어떤 로봇 대회가 있던 빠지지 않는 대회는 라인트레이서를 이용한 대회입니다. 라인을 따라가며 명령을 수행하는 대회에서 중요한 것 중 하나는 정확하게 코스를 통과하는 것입니다. 그런데 문제는 로봇을 만드는 회사 마다 명령어가 다르게 사용되고 대회 참여자들도 거기에 맞게 공부를 해야 한다는 것입니다. 그렇다고 모든 회사에 맞게 명령어를 공부할 수는 없는 일이지요. 저는 많은 회사 중에서 SRC에서 제공하는 라인트레이서로 여러가지 코스 중에서 가장 기본이 되는 십자 코스를 알아보고자 합니다.
십자코스는 + 모양과 T 모양이 있습니다. 두가지의 길은 로봇의 직진방향에 선이 있느냐 없느냐 입니다. 선이 있는 것은 직진을 할 수 있고 없는 것은 직진은 하지 못하는 위치입니다. 물론 길이 없는 곳을 가야 할 때도 발생하지만 대부분은 선을 따라가기 때문에 직진을 못한다고 봅니다. 우선 명령어들을 알아 봅시다.
SRC로봇의 기본 명령은 알파벳 2개의 조합으로 만들어 집니다.
방향은 다음의 5가지가 기본입니다.
G : 직진 , R : 오른쪽 , L : 왼쪽 , T:회전, S:멈춤
교차로의 모양
T : + 교차로, F : ㅏ 교차로
위의 방향과 교차로 명령어를 조합하여 로봇을 움직입니다.
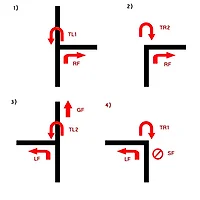
지금 부터 알아볼 명령어는 십자교차로에서의 선택입니다.
십자교차로에서 선택할 수 있는 명령어는
직진(GT), 오른쪽(RT), 왼쪽(LT),
오른쪽턴(TR1), 왼쪽턴(TL1), 오른쪽 180도턴(TR2), 왼쪽 180도턴(TL2),
멈추기(ST)가 있습니다.
여기서 턴명령은 멈추기(ST)로 정확하게 멈춘 후에 하는 것이 안정적입니다.

+ 교차로는 라인트레이서의 기본이기 때문에 꼭 익혀 두도록 합시다.
'로봇만들기' 카테고리의 다른 글
| [라인트레이서] SRC 트렌스포터 집게 서보모터 함수 만들기 (0) | 2011.01.26 |
|---|---|
| SRC 라인트레이서 로봇 - 서보모터(SERVO) 살펴 보기 (0) | 2011.01.20 |
| SRC 라인트레이서 고급 명령어 알아보기 (1) | 2011.01.13 |
| [로봇] 라인트레이서 F교차로 알아 보기 (2) | 2010.12.16 |