라인트레이서 로봇 대회들 중에서 장애물을 옮기는 미션이 있는 트랜스포터 대회에서는 서보모터를 기본으로 사용하는 경우가 많이 있습니다. 서보모터는 한 바퀴를 모두 회전하는 모터가 아닌 왼쪽과 오른쪽으로 90도 정도씩만 움직이는 모터 입니다.
이 모터와 프레임을 연결하여 집게를 만들어 대회에 참여하게 됩니다.
서보모터의 기본은 0점을 맞추는 것으로 시작 됩니다. 0점을 맞추는 방법은 라인트레이서에 서보모터를 연결한 후 명령어를 이용하여 모터에 0점으로 이동하게 하면 됩니다.
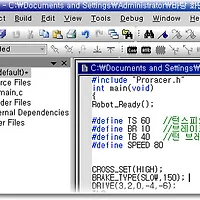
기본적으로 SRC로봇에서는 서보모터를 사용하라는 명령어를 넣어야 작동이 됩니다.
SERVO_ENABLE(1);
이라는 명령을 라인트레이서 명령을 넣는 main() 안에 넣습니다.
다음으로 서보모터에 명령을 내릴 차례입니다.
SERVO(SV1,0,30);
위의 명령을 라인트레이서 명령을 넣는 곳에 작성합니다. SERVO함수의 인수들을 살펴 보면 SV1은 서보모터 번호 입니다. SRC에서는 모터를 4개까지 쓸 수 있으며 SV1, SV2, SV3, SV4로 각각 정의 되어 있습니다. 다음으로 들어 가는 것이 모터의 각도 입니다. 0점을 맞추는 값인 0 을 집어 넣습니다. 그다음 30은 모터의 움직이는 속도 입니다. 너무 빠르거나 느리지 않게 집어 넣으면 됩니다.

위의 사진이 0점을 맞춘 사진 입니다. 빨간색 암(구멍 5개짜리 빨간 플라스틱)을 달기 전에 영점을 조절 후 부착을 해야 합니다.
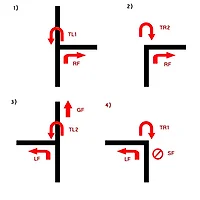
이 SRC 서보 모터의 작동 범위는 50 ~ - 50 까지 입니다. 각도를 말하면 약 105도 ~ -105도 정도를 움직입니다.
보통 90도에서 -90도를 작동 범위로 생각한다면 45 ~ - 45까지를 사용하면 됩니다.
아래의 사진은 90도로 움직인 상태 입니다.
SERVO(SV1,45,30);
명령을 사용했습니다.

반대로 -90도를 작동한 형태가 아래의 사진 입니다.
SERVO(SV1,-45,30);
명령을 사용했습니다.

0도와 90도 중간 쯤인 45도를 사용하고자 하면 명령에서 25정도를 입력하면 됩니다.
자신이 가지고 있는 서보모터를 이용하여 테스트를 한 후에 사용을 해야 대회에 참여했을 때 모터에 무리가 적고 원하는 작동결과를 얻을 수 있습니다.
'로봇만들기' 카테고리의 다른 글
| [라인트레이서] SRC 트렌스포터 집게 서보모터 함수 만들기 (0) | 2011.01.26 |
|---|---|
| SRC 라인트레이서 고급 명령어 알아보기 (1) | 2011.01.13 |
| [로봇] 라인트레이서 F교차로 알아 보기 (2) | 2010.12.16 |
| SRC 라인트레이서 로봇 미로찾기 명령어 + 교차로 알아보기 (0) | 2010.12.15 |